Moteurs de véhicules électriques
Quelle que soit la source du courant – batterie chimique ou pile à combustible – un des enjeux du véhicule électrique est le choix du moteur, permettant la propulsion des roues à partir de la puissance délivrée par la source de courant.
Le principe de fonctionnement d’un moteur électrique est bien plus simple que celui d’un moteur thermique.
C’est d’ailleurs pourquoi la première voiture fonctionnait à l’électricité. Les avantages d’un moteur électrique, comparé à un moteur thermique, sont nombreux. Il est important de noter que contrairement au moteur thermique, qui a un couple maximal pour une vitesse de rotation de plusieurs milliers de tours par minute, le moteur électrique a un couple disponible instantanément, permettant une accélération plus rapide au démarrage. Ci-dessous, l’exemple de la machine asynchrone.
De plus, et alors qu’un moteur thermique devra constamment tourner, même à l’arrêt, pour fournir du couple, le moteur électrique peut être « éteint » aux feux rouges et « garder » un couple disponible. Ce couple pourra être conservé sur une large gamme de fréquence, c’est-à-dire de vitesse de rotation des roues, éliminant ainsi l’intérêt d’une boite de vitesse.
Les différents types de moteurs électriques utilisés
Les moteurs à courant continu
Les premiers moteurs électriques équipant les véhicules étaient des moteurs à courant continu. Le choix de ce moteur était guidé pas la facilité du pilotage en vitesse. L’électronique de puissance permettant de l’alimenter est très simple car la tension continue venant de la batterie peut être utilisée directement.
Le moteur à courant continu est constitué de deux parties :
- Un stator (inducteur) générant un champ magnétique constant, soit à partir d’enroulements alimentés en courant continu, soit à l’aide d’aimants permanents ;
- Un rotor (induit) alimenté en courant à l’aide de connections balais-collecteurs.
La façon d’alimenter les deux parties du moteur différencie les moteurs séries des moteurs à excitation séparée. Le pilotage en vitesse se fait aisément en ajustant le courant rotorique.
Le problème de ces moteurs est que la connexion au niveau du collecteur et des balais génère des pertes et sont sujets à l’usure. L’évacuation des pertes joules pose problème car elles sont générées au niveau du rotor. Enfin, un rendement maximum de 90% rend ce modèle un peu obsolète pour une utilisation actuelle dans un véhicule électrique.
Les moteurs à courant alternatif
C’est l’émergence de nouvelles technologies en électronique de puissance qui a permis l’apparition des moteurs à courant alternatif dans les véhicules électriques. En effet, afin d’alimenter les moteurs asynchrones et synchrones, le système doit comprendre entre la batterie et le moteur un onduleur de courant triphasé. Cet onduleur doit être réversible en courant afin de pouvoir utiliser la machine en mode générateur lors de la décélération.
Afin de commander ces moteurs, deux grandeurs doivent être maîtrisées : la tension et la fréquence du signal alternatif fourni par l’onduleur. Pour fixer la fréquence, il suffit de piloter les six interrupteurs avec une fréquence variable. Pour la tension, l’onduleur doit également inclure une fonction de modulation des largeurs d’impulsion (MLI).
Le moteur à réluctance variable
Ce moteur est basé sur le principe de la réluctance, il a un rotor uniquement composé de tôles et des bobinages au stator. L ’avantage de ce type de moteur est que ses pertes rotoriques sont très faibles, il y a très peu de courant induit et la température des roulements est moins élevée. Un prix attractif et une simplicité de réalisation de la machine sont contrebalancés par un pilotage complexe, des courants non sinusoïdaux, un entrefer réduit et une structure d’onduleur (4 ou 6 phases) spécifique à cette technologie. Il faut aussi traiter les générations de bruits et les oscillations de couple importantes à basse vitesse.
Le moteur asynchrone
Dans ce moteur, le stator est alimenté en courants triphasés sinusoïdaux. Un champ statorique tournant est donc généré. Ce dernier induit des courants dans le rotor et entraine ainsi le rotor en rotation à une vitesse plus faible que celle du champ statorique tournant. L’écart de vitesse est caractérisé par le glissement. C’est ce glissement qui est la grande faiblesse des moteurs asynchrones : plus il est important, plus le rendement du moteur est faible. C’est une machine sans balais, sans aimants et équipée d’un capteur de régime. Si sa dynamique en couple est moins bonne que pour celle d’une machine à aimants, son pilotage est plus simple que pour les machines synchrones. Le moteur asynchrone présente un bon rendement à faible charge mais nécessite un entrefer faible ce qui ne permet pas de réaliser des moteurs roue. Il présente des pertes significatives à fort couple et bas régime (magnétisation du rotor). Il a un encombrement et masse supérieure à celle d’une machine à aimants
Le moteur synchrone
Les moteurs synchrones présentent, eux, un glissement nul. Ils sont donc ceux vers qui se tournent aujourd’hui les constructeurs de véhicules électriques : avec de meilleurs rapports couple/poids et puissance volumique et avec des rendements supérieurs, ils sont divisés en deux catégories : les bobinés et les aimants permanents.
Le moteur synchrone bobiné n’a pas d’aimants au rotor mais un bobinage pour créer le champ. Sa densité de couple est comparable aux machines asynchrones. Il a un pilotage plus simple que pour les machines à aimants. Le pilotage est réalisé par le contrôle du champ du rotor à travers son bobinage via un régulateur électronique faible puissance et des balais pour amener le courant au rotor. Il a des pertes à charge partielle faibles, et un bon rendement à forte charge, son encombrement est supérieur et sa dynamique en couple moins bonne qu’une machine à aimants
Tandis que les bobinés ont un rotor aimanté à l’aide de courants, les moteurs synchrones à aimants permanents n’ont pas besoin d’enroulements au rotor. Ils sont donc plus légers et n’ont plus de pertes joules au rotor ; les pertes au stator étant faciles à évacuer. Ce moteur présente un couple massique maximal pour les machines à flux radial, une dynamique en couple très élevée et un temps de réponse très rapide (quelques dizaines de ms). Son pilotage est complexe avec courant sinusoïdaux et capteur de position. Il a un bon rendement à forte charge mais des pertes significatives à charge partielle et haut régime. Son coût est supérieur en raison du prix des aimants NeFeB (30% du prix Mel).
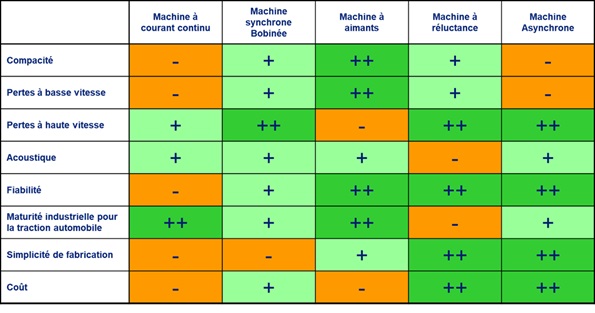
Comparaisons entre les différents types de moteurs électriques
Le tableau suivant présente les différents moteurs par rapport aux critères importants demandés par l’automobile.
L’avenir du moteur électrique est certainement en passe de devenir un sujet annexe dans les discussions sur les performances des véhicules électriques ; la batterie représentant le réel défi technologique. Son encombrement sera peu à peu réduit en mettant en œuvre des structures de moteur innovantes